Note
Go to the end to download the full example code.
12.1.10.1.7. Measurement#
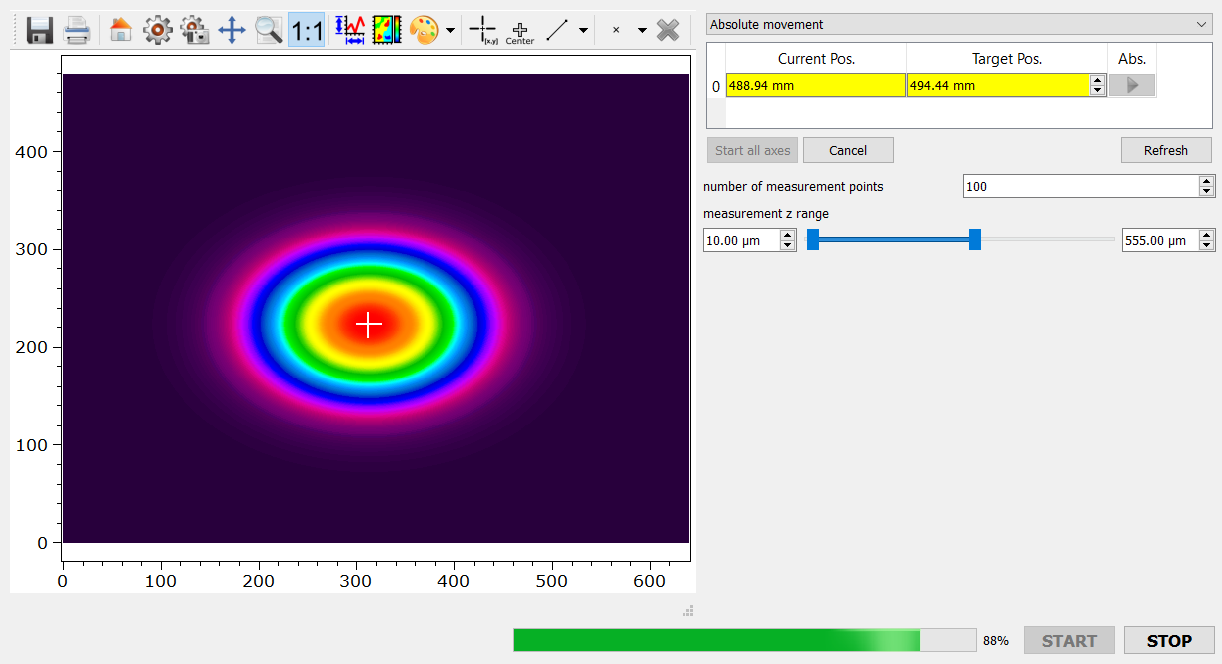
This example shows how a typical measurement automation can be realized in itom.
Let’s say a laser beam is detected by a camera. Different positions are to be approached
with a actuator stage and camera images are to be recorded.
Afterwards the centroid position distribution of the beam is evaluated.
Finally the result is plotted in three different ways using the itom.plot1, matplotlib
and plotly plot engine.
from itom import actuator
from itom import dataIO
from itom import dataObject
from itom import algorithms
from itom import plot1
from itom import plot2
from itom import ui
from itomUi import ItomUi
import numpy as np
import matplotlib.pyplot as plt
import plotly.express as px
This is the main measurement class consisting of following methods:
__init__ : Constructor of the class which opens the
MeasureGUI, connects to a cameraDummyGrabber, connects to a actuator stageDummyMotor.on_pushButtonStart_clicked : Start measurement methods which is connected to the signal
clickedof the buttonpushButtonStartof the GUI.measurementRoutine : Measurement routine which moves the actuator
DummyMotorto the given positions, captures the cameraDummyGrabberimages and evaluates the centroid distribution. Afterwards the live image of the camera is activated again.
class MeasureDemoGUI(ItomUi):
def __init__(self):
"""Constructor method of the MeasureDemoGUI class."""
# init the gui
ItomUi.__init__(self, "MeasureGUI.ui", ui.TYPEWINDOW, deleteOnClose=True)
# init cam and mot
self.cam = dataIO("DummyGrabber", imageType="gaussianSpot")
self.mot = actuator("DummyMotor", numAxis=1)
self.mot.setParam("speed", 1000)
# define widget values
self.gui.spinBoxNumZSteps["value"] = 100
self.gui.doubleRangeWidgetZRange["minimum"] = 0.0
self.gui.doubleRangeWidgetZRange["maximum"] = 1000.0
self.gui.doubleRangeWidgetZRange["minimumValue"] = 10.0
self.gui.doubleRangeWidgetZRange["maximumValue"] = 555.0
# show liveimage
self.cam.startDevice()
self.gui.camPlot["camera"] = self.cam
self.gui.camPlot["colorMap"] = "OSIRainbow"
self.gui.camPlot["keepAspectRatio"] = True
# access motor controller
self.gui.MotorAxisController["actuator"] = self.mot
self.gui.MotorAxisController["numAxis"] = 1
self.gui.MotorAxisController["defaultAxisType"] = "TypeLinear"
# connect
# self.gui.pushButtonStart.connect("clicked()", self.startMeasure)
# define measure data object
self.imageStack = None
self.centroidData = None
# connect stop button to interrupt
self.gui.pushButtonStop.invokeKeyboardInterrupt("clicked()")
# show the gui
self.gui.show()
self.gui.call("statusBar").call("showMessage", "Initialization finished.", 5000)
return
@ItomUi.autoslot("")
def on_pushButtonStart_clicked(self):
"""Function trigger by pushButtonStart"""
self.gui.call("statusBar").call("showMessage", "Start Measurement", 5000)
with self.disableGui([self.gui.pushButtonStart], showWaitCursor=False):
minVal = self.gui.doubleRangeWidgetZRange["minimumValue"]
maxVal = self.gui.doubleRangeWidgetZRange["maximumValue"]
steps = self.gui.spinBoxNumZSteps["value"]
self.measurementRoutine(minVal, maxVal, steps)
self.gui.call("statusBar").call("showMessage", "Stop Measurement", 5000)
return
def measurementRoutine(self, zMin: float, zMax: float, numZSteps: int):
"""Measurement routine along input z range
Args:
zMin (float): Minimum z position
zMax (float): Maximum z position
numZSteps (int): Number of z positions
"""
# Create z positions vector
zVec = np.linspace(zMin, zMax, num=numZSteps)
# disable camera auto grabbing
self.cam.disableAutoGrabbing()
# define measurement data object
bpp = self.cam.getParam("bpp")
if bpp == 8:
dtype = "uint8"
else:
dtype = "uint16"
self.imageStack = dataObject(
[len(zVec), self.cam.getParam("sizey"), self.cam.getParam("sizex")], dtype
)
self.centroidData = dataObject([2, len(zVec)], "float32")
# centroidMarker dObj
centroidMarker = dataObject([2, 1], "float32")
# loop for all z positions
for idx, z in enumerate(zVec):
self.gui.call("statusBar").call(
"showMessage", f"z measurement position {z}", 5000
)
# goto new motor position
self.mot.setPosAbs(0, z)
# acquire image
d = dataObject()
self.cam.acquire()
self.cam.copyVal(d)
# eval the centroid
cYI, cXI, cY, cX = algorithms.centroidXY(d)
# add to data stack
self.imageStack[idx, :, :] = d
self.centroidData[0, idx] = cX
self.centroidData[1, idx] = cY
# plot current image and centroid
self.gui.camPlot["source"] = d
centroidMarker[0, 0] = cX
centroidMarker[1, 0] = cY
self.gui.camPlot.call("deleteMarkers")
self.gui.camPlot.call(
"plotMarkers", centroidMarker, "w+25;2", "centroid", 0
)
self.gui.progressBar["value"] = idx / (len(zVec) - 1) * 100
self.cam.enableAutoGrabbing()
self.gui.camPlot.call("deleteMarkers")
self.gui.camPlot["camera"] = self.cam
# define imageStack
self.imageStack.setAxisDescription(0, "z axis of actuator")
self.imageStack.setAxisDescription(1, "y axis")
self.imageStack.setAxisDescription(2, "x axis")
self.imageStack.setAxisUnit(0, "mm")
self.imageStack.setAxisUnit(1, "\xb5m")
self.imageStack.setAxisUnit(2, "\xb5m")
# calc meta info
zScale = (zMax - zMin) / (numZSteps - 1)
zOffset = -(zVec[0] / zScale)
self.imageStack.setAxisScale(0, zScale)
self.imageStack.setAxisOffset(0, zOffset)
self.imageStack.setAxisScale(1, 17e-3) # pixel pitch of 17 \xb5m
self.imageStack.setAxisScale(2, 17e-3) # pixel pitch of 17 \xb5m
self.imageStack.valueDescription = "intensity"
self.imageStack.valueUnit = "counts"
# plot imagestack
plot2(self.imageStack)
self.centroidData.setAxisScale(1, zScale)
self.centroidData.setAxisOffset(1, zOffset)
self.centroidData.valueDescription = "centroid position"
self.centroidData.valueUnit = "mm"
self.centroidData.setTag("legendTitle0", "x centroid")
self.centroidData.setTag("legendTitle1", "y centroid")
# plot x, y as lines
plot1(
self.centroidData,
properties={"legendPosition": "Right", "grid": "GridMajorXY"},
)
# plot y vs. x
yData = self.centroidData[0, :].squeeze()
xData = self.centroidData[1, :].squeeze()
yData.valueDescription = "y centroid position"
xData.valueDescription = "x centroid position"
plot1(
yData,
xData=xData,
properties={
"keepAspectRatio": True,
"grid": "GridMajorXY",
"lineStyle": "NoPen",
"lineSymbol": "XCross",
},
)
# plot using matplotlib
xData = np.squeeze(np.array(xData))
yData = np.squeeze(np.array(yData))
plt.figure()
plt.scatter(xData, yData)
plt.xlabel("x centroid /mm")
plt.ylabel("y centroid /mm")
plt.show()
# plot using plotly
figly = px.scatter(
x=xData, y=yData, labels={"x": "x centroid /mm", "y": "y centroid /mm"}
)
figly.show()
# -------------------------------
if __name__ == "__main__":
demo = MeasureDemoGUI()
Total running time of the script: (0 minutes 3.460 seconds)